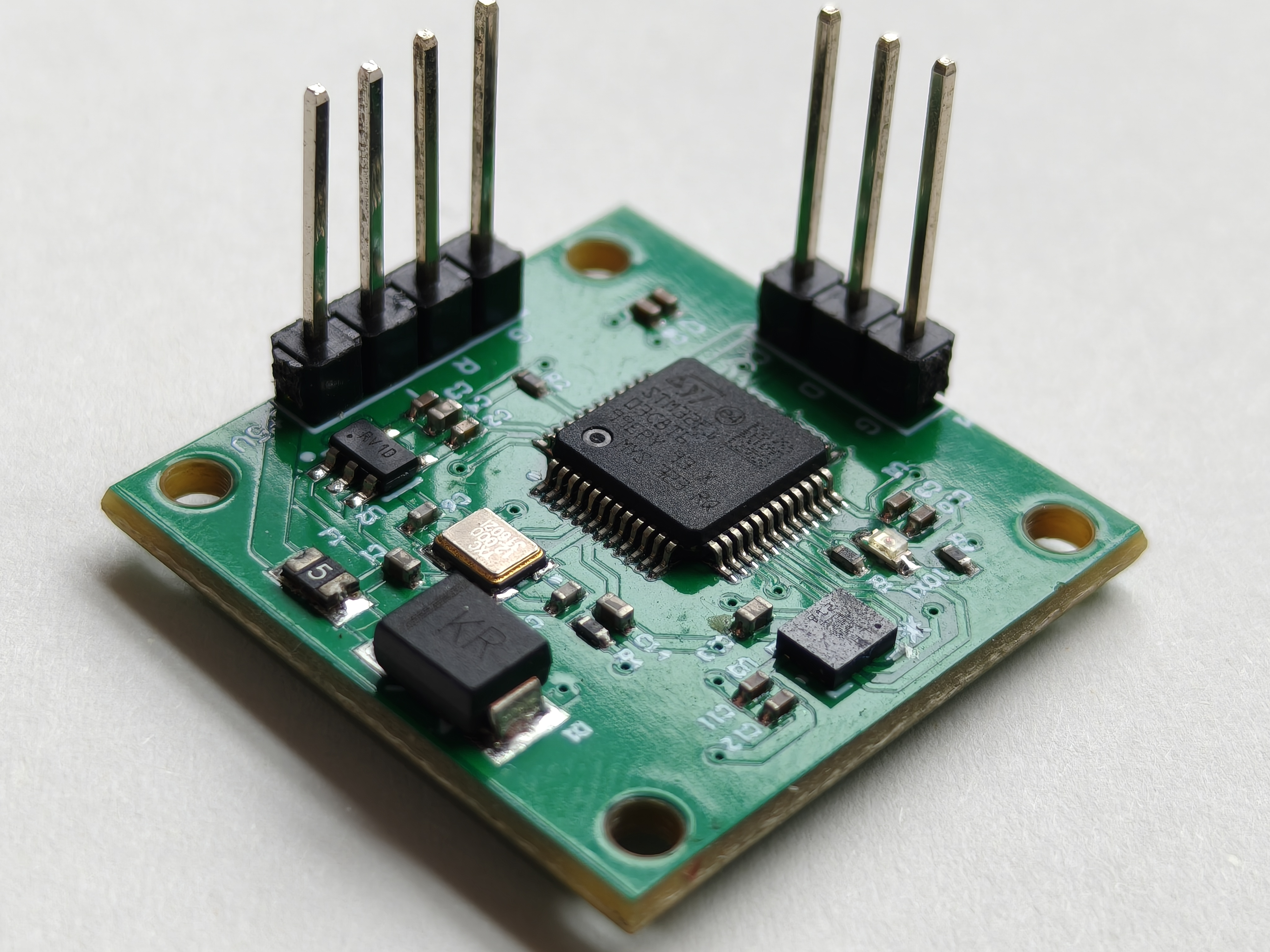
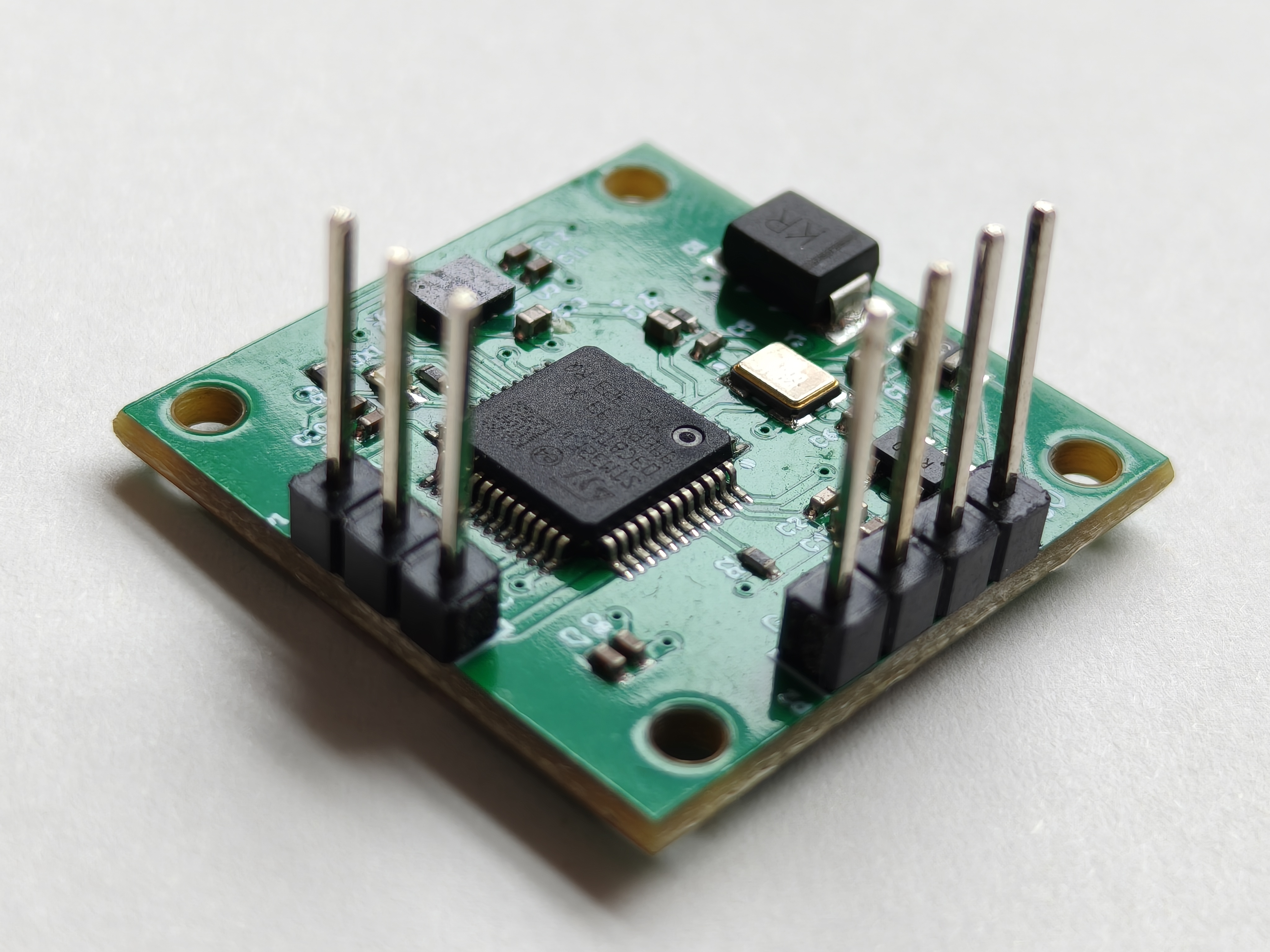
IMU姿态传感器 角速度量程:±125dps~±4000dps 输出速率:12.5Hz~6667Hz(可定制) 解算频率:最高 1000Hz(实时姿态捕捉) 加速度计量程:±2g~±16g(多档可选) 陀螺仪零偏不稳定性:3 deg/h(车规级) 优势功能:自主融合算法,实时温度补偿,减少漂移 抗噪能力强:适用于恶劣工业环境 应用场景:无人机,机器人,自动驾驶等 活动抢购价1500
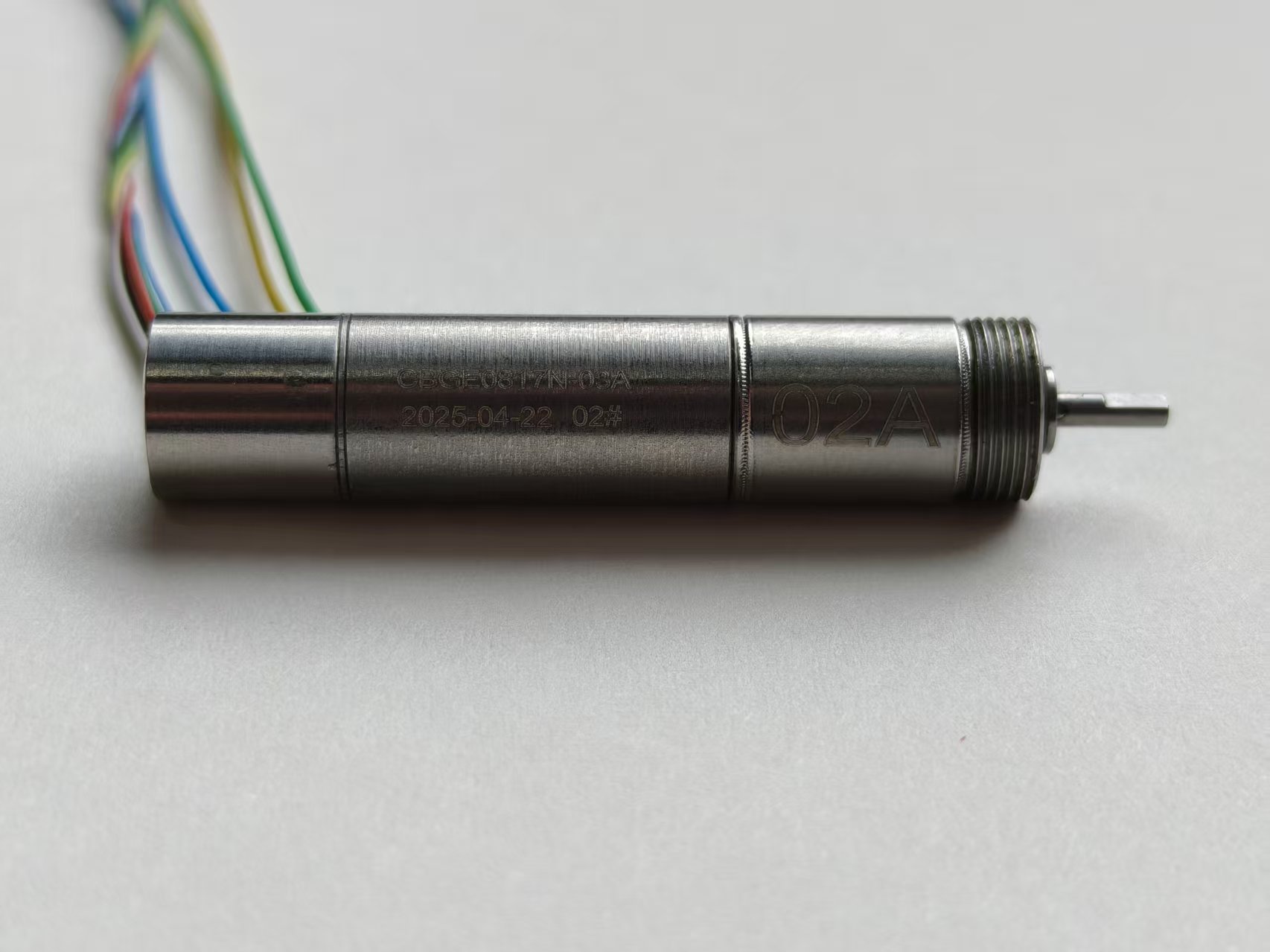
行星减速空心杯电机 额定转速:38200±10%rpm 空载转速:43500±10%rpm 额定扭力:0.50 mN.m 堵转力矩:4.3mN.m Ref 空载转速:176.2±10%rpm 减速比:154.7±10%rpm 额定转速:246.9:1 减速箱轴向窜量:0.1mm max 额定扭力:61.7mN.m Ref 活动抢购价2000